
Engineer and researcher.
Engineer and researcher.
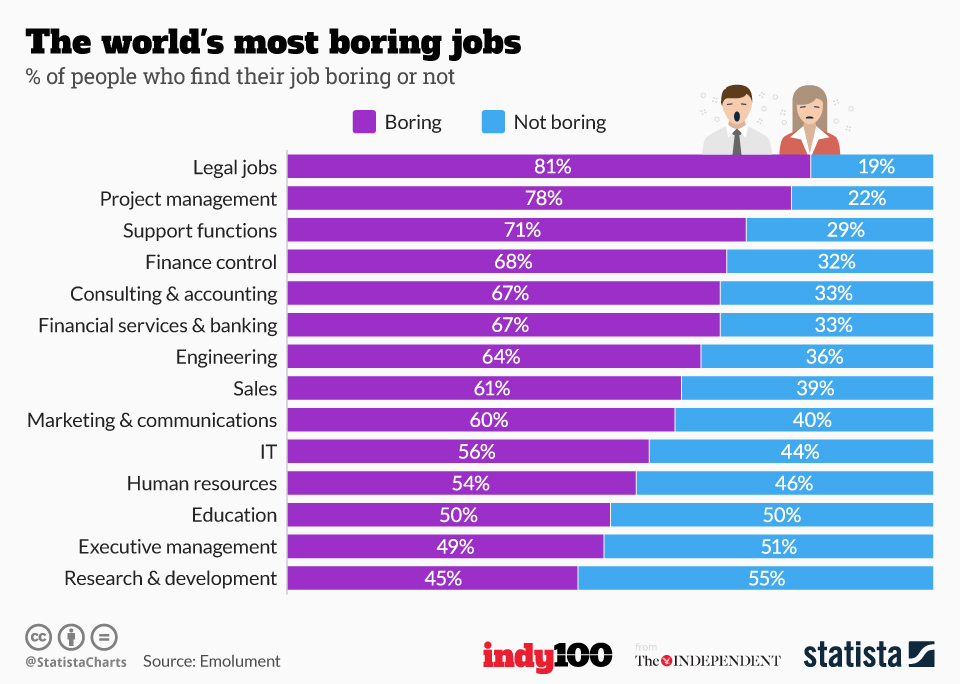
Los trabajos legales podrían estar bien pagados, pero según una nueva investigación, son los trabajos más aburridos del planeta....
El almacenamiento de energía es un concepto que muchos probablemente no habrían pensado un segundo hace algunos años atrás....
Una revisión del atractivo (pero no muy explotado) mercado de carbono Introducción Es sabido que el desarrollo e implementación...
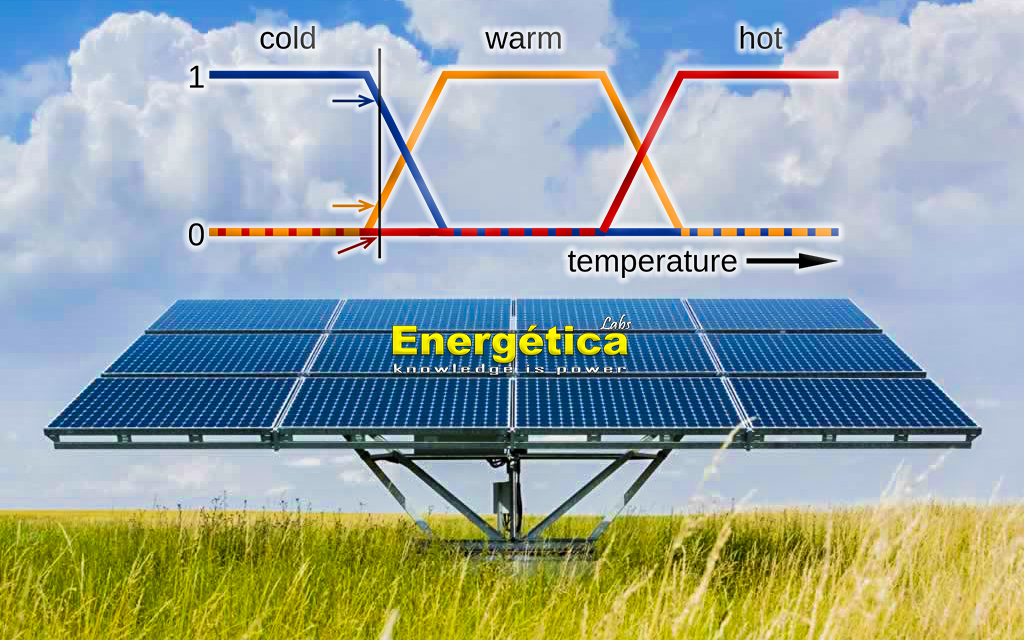
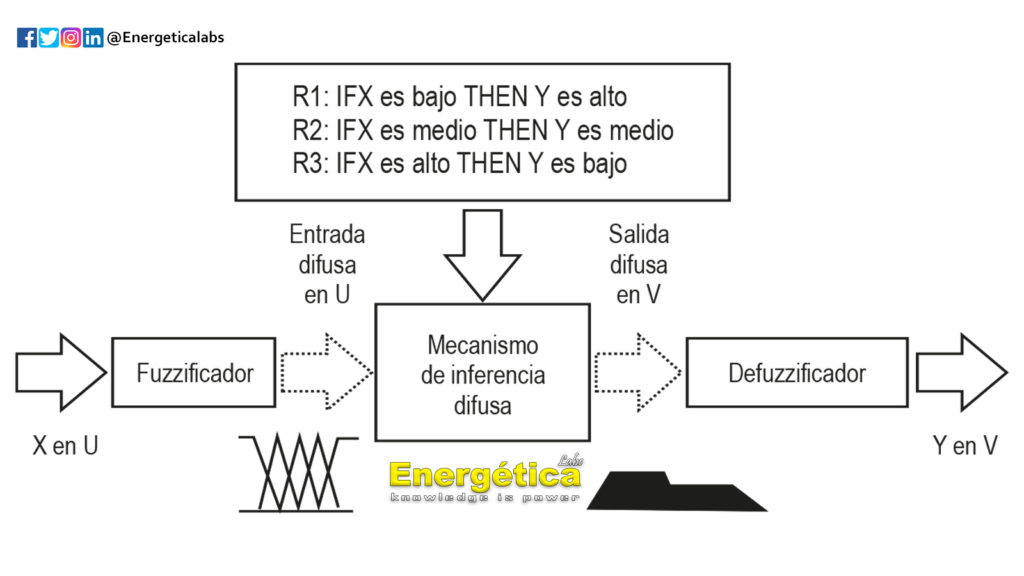
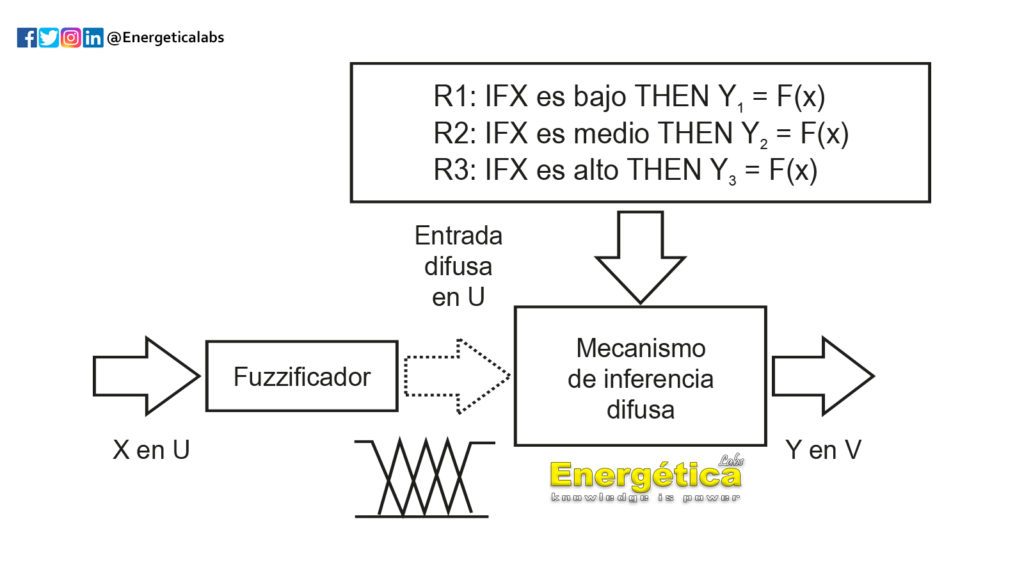
Principales aplicaciones de modelos de lógica difusa en sistemas de energía renovable fotovoltaica: difusos, híbiridos y de decisión multicriterio....
El LCOE representa una herramienta adecuada para comparar el costo de las tecnologías renovables y de almacenamiento de electricidad...
El modelamiento y análisis más completo en sistemas solares fotovoltaicos mediante el lenguaje más versátil de la ciencia de...
Acelerar la inversión podría generar enormes ganancias para el PBI mundial para 2050 mientras se aborda la emergencia climática,...
Además del LCOE existen otras métricas particulares para medir el rendimiento técnico y económico de los proyectos de energía....

©2026 Energética Labs